












SIMRAD ForwardScan® 感測器
借助 Simrad ForwardScan,瞭解前方的詳細情況這款聲納率先採用二維成像技術,能清晰地獲取前方船隻的海底圖像,讓您在淺水區或海圖不明確的水域仍能有把握地完成導航。ForwardScan 能即時更新前方視圖,且視圖深度可達當前的八倍之多,在保障您安全的同時讓您輕鬆享受海上時光。
我們的 ForwardScan 感測器與 Simrad NSS evo2 和 NSO evo2 MFD 系統相容,且可輕鬆安裝在幾乎所有船隻上。
|
|

主要特徵
Ø 易於使用Ø 前瞻性 2D 聲納成像
Ø 海底彩色追蹤、簡化海底視圖
Ø 首向線視圖將 ForwardScan 深度資料與海圖上的首向線結合
Ø 淺景深警報
Ø 可觀察到的深度極限最大可達當前的 8 倍,通常為當前的 4 至 5 倍。
Ø 工作頻率為 180 kHz,降低了傳統 200 kHz 測深儀對它的干擾
Ø 內置式溫度感測器
Ø 50.8 mm (2”) 貫穿船體式不銹鋼管件
Ø 通過 SonarHub 聲納元件與 Simrad NSS evo2 或 NSO evo2 直接連接
Overview
Ø Simrad ForwardScan 技術
ForwardScan 率先為用戶提供前方船隻底部的二維聲納圖像。ForwardScan 功能強大,在較淺、陌生或海圖不明確的水域都能防止船隻迷失方向,而且有助於為船隻找到下錨的安全地帶。
Ø ForwardScan 感測器的工作頻率為 180 kHz,降低了傳統 200 kHz 測深儀對它的干擾,而且:
可觀察到的深度極限最大可達當前的 8 倍,
如當前深度為 3 m(10 英尺)時,則使用後的可視深度達到 24 m(80 英尺)。
可觀察到的深度極限一般可達當前的 4 至 5 倍,
如當前深度為 3 m(10 英尺)時,則使用後的深度達到 12 至 15 m(40 至 50 英尺)。
Ø Simrad NSS evo2/NSO evo2 MFD 集成
ForwardScan 可通過 StructureScan 埠與任意 Simrad NSS evo2 多功能顯示器快速輕鬆地連接,無需其他任何硬體。對於已經應用 StructureScan 的 NSO evo2 模組系統或 NSS evo2 系統而言,ForwardScan 會通過可選的 Simrad SonarHub 測深儀元件與其相連。
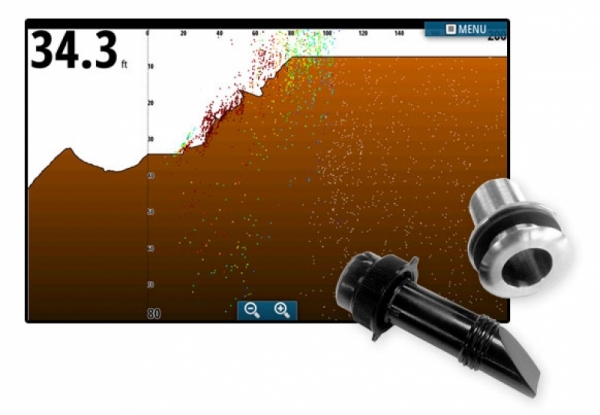
Ø 海底彩色追蹤
海底彩色追蹤 (Bottom Colour Tracking) 為您提供前船海底即時 2D 實體效果圖,且圖像簡單易懂。助您快速根據獲取的資訊做出準確決策,無需解讀測深儀返回的單個資料點。
| 應用資料點的海底彩色追蹤 | 僅限海底彩色追蹤 |
Ø 首向線視圖
首向線視圖將 ForwardScan 深度資料與顯示在 Simrad MFD 導航頁面上的首向線相結合。這條線由各個彩色分段的線段組成,分別代表深、中和淺水區,可根據船隻的吃水量為您專門定制深度範圍。
Ø ForwardScan 的前方探測範圍與首向線的長度自動同步:在 ForwardScan 顯示器的分屏式導航視圖中,您的船隻到首向線末端的整體距離以二維方式呈現。將 ForwardScan 資料、海圖上顯示的深度和您目前的航線快速整合,使您全面瞭解前方的情況。
Ø 安裝簡易
ForwardScan 可通過 50.8 mm (2”) 不銹鋼貫穿船體的方式安裝於幾乎所有船隻上。可在橫斜高角為 12° 的 25.4 mm (1”) 厚船殼上安裝,也可在橫斜高角為 20°的 19 mm (3/4”) 船殼上安裝。
Ø 預安裝套件僅包含套管和堵塞器,為可選產品,造船師可利用 ForwardScan 為船隻升級。之後,經銷商或客戶就可以將 ForwardScan 感測器安裝在船隻上,即使船隻剛被水沖過也可安裝。
