












SIMRAD ForwardScan® 传感器
借助 Simrad ForwardScan,了解前方的详细情况这款声纳率先采用二维成像技术,能清晰地获取前方船只的海底图像,让您在浅水区或海图不明确的水域仍能有把握地完成导航。ForwardScan 能实时更新前方视图,且视图深度可达当前的八倍之多,在保障您安全的同时让您轻松享受海上时光。
我们的 ForwardScan 传感器与 Simrad NSS evo2 和 NSO evo2 MFD 系统兼容,且可轻松安装在几乎所有船只上。
|
|

主要特征
Ø 易于使用Ø 前瞻性 2D 声纳成像
Ø 海底彩色追踪、简化海底视图
Ø 首向线视图将 ForwardScan 深度数据与海图上的首向线结合
Ø 浅景深警报
Ø 可观察到的深度极限最大可达当前的 8 倍,通常为当前的 4 至 5 倍。
Ø 工作频率为 180 kHz,降低了传统 200 kHz 测深仪对它的干扰
Ø 内置式温度传感器
Ø 50.8 mm (2”) 贯穿船体式不锈钢管件
Ø 通过 SonarHub 声纳组件与 Simrad NSS evo2 或 NSO evo2 直接连接
Overview
Ø Simrad ForwardScan 技术
ForwardScan 率先为用户提供前方船只底部的二维声纳图像。ForwardScan 功能强大,在较浅、陌生或海图不明确的水域都能防止船只迷失方向,而且有助于为船只找到下锚的安全地带。
Ø ForwardScan 传感器的工作频率为 180 kHz,降低了传统 200 kHz 测深仪对它的干扰,而且:
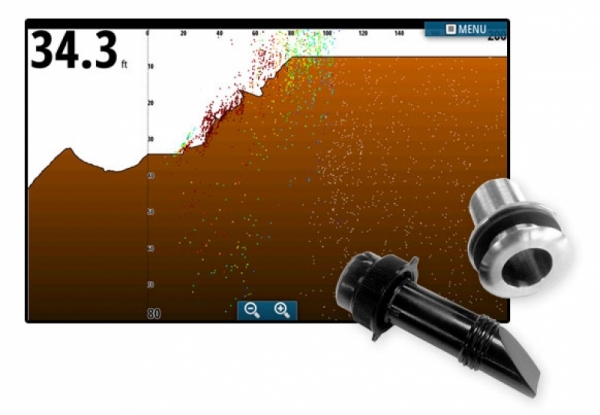
可观察到的深度极限最大可达当前的 8 倍,
如当前深度为 3 m(10 英尺)时,则使用后的可视深度达到 24 m(80 英尺)。
可观察到的深度极限一般可达当前的 4 至 5 倍,
如当前深度为 3 m(10 英尺)时,则使用后的深度达到 12 至 15 m(40 至 50 英尺)。
Ø Simrad NSS evo2/NSO evo2 MFD 集成
ForwardScan 可通过 StructureScan 埠与任意 Simrad NSS evo2 多功能显示器快速轻松地连接,无需其它任何硬件。对于已经应用 StructureScan 的 NSO evo2 模块系统或 NSS evo2 系统而言,ForwardScan 会通过可选的 Simrad SonarHub 测深仪组件与其相连。
Ø 海底彩色追踪
海底彩色追踪 (Bottom Colour Tracking) 为您提供前船海底实时 2D 实体效果图,且图像简单易懂。助您快速根据获取的信息做出准确决策,无需解读测深仪返回的单个数据点。
| 应用数据点的海底彩色追踪 | 仅限海底彩色追踪 |
Ø 首向线视图
首向线视图将 ForwardScan 深度数据与显示在 Simrad MFD 导航页面上的首向线相结合。这条线由各个彩色分段的线段组成,分别代表深、中和浅水区,可根据船只的吃水量为您专门定制深度范围。
Ø ForwardScan 的前方探测范围与首向线的长度自动同步:在 ForwardScan 显示器的分屏式导航视图中,您的船只到首向线末端的整体距离以二维方式呈现。将 ForwardScan 数据、海图上显示的深度和您目前的航线快速整合,使您全面了解前方的情况。
Ø 安装简易
ForwardScan 可通过 50.8 mm (2”) 不锈钢贯穿船体的方式安装于几乎所有船只上。可在横斜高角为 12° 的 25.4 mm (1”) 厚船壳上安装,也可在横斜高角为 20°的 19 mm (3/4”) 船壳上安装。
Ø 预安装套件仅包含套管和堵塞器,为可选产品,造船师可利用 ForwardScan 为船只升级。之后,经销商或客户就可以将 ForwardScan 传感器安装在船只上,即使船只刚被水冲过也可安装。
